Highly automated driving (SAE Level 3) enables vehicles to take over longitudinal and lateral control without requiring constant driver supervision (Gasser et al., 2012). This technology, already approved for public roads in the U.S. since 2015 (Daimler AG, 2018), is expected to become widespread in Germany as well (Bengler et al., 2014). Beyond safety and efficiency, automation allows drivers to engage in non-driving-related tasks (NDRTs), increasing productivity (Kaur & Rampersad, 2018). Truck drivers, for instance, can use this time for rest or logistical planning (Flämig, 2015).
A key challenge in highly automated driving is ensuring a smooth transition back to manual control when system limits are reached or errors occur. Issues such as inadequate trust, reduced situational awareness, and skill degradation pose risks (Manzey, 2012). To address these concerns, this project evaluates and optimizes a multimodal Human-Machine Interface (HMI) tailored for highly automated truck driving.
Research & Development
Human-Machine Interface Concept
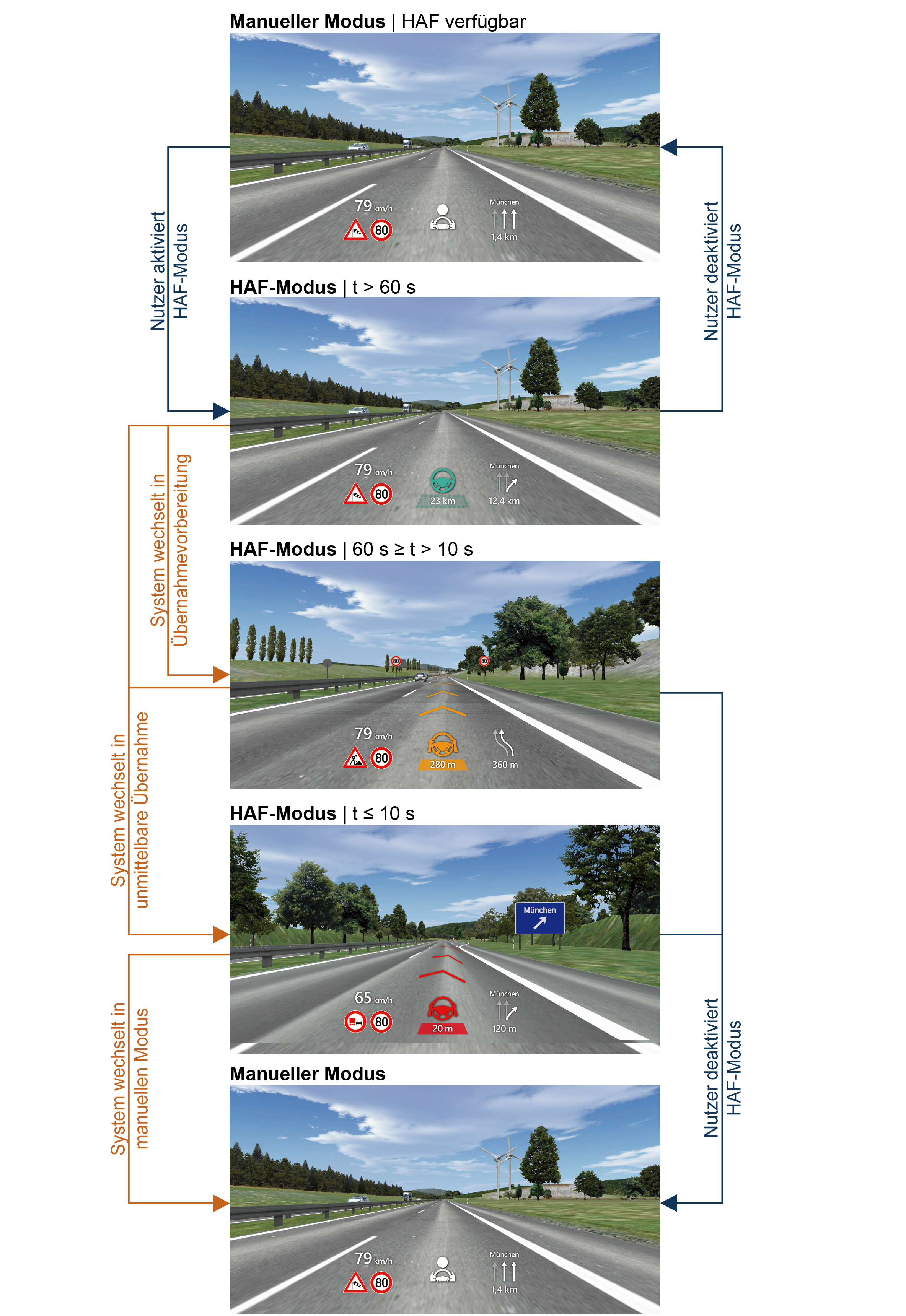
As part of preceding research (Czaplarski, 2018; Lehmer, 2018; Richardson et al., 2018), a prototype HMI tailored to highly automated truck driving was developed. The HMI aims to provide intuitive feedback and facilitate efficient human-automation transitions.

Evaluation
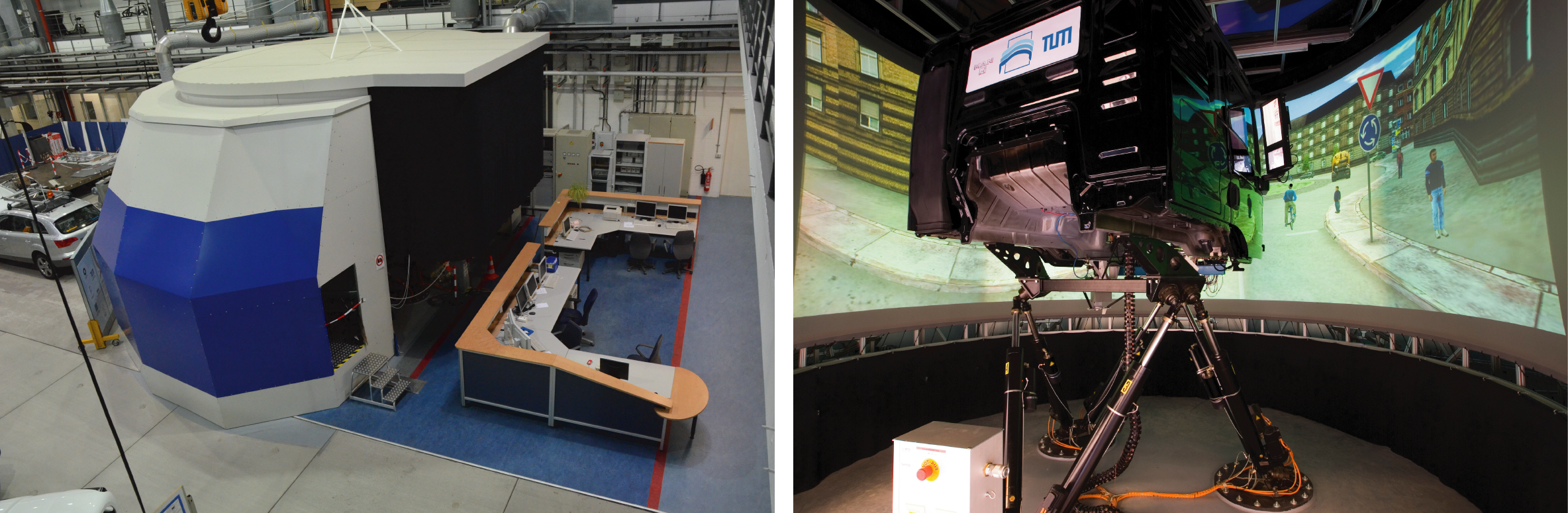
Driving Simulator Study
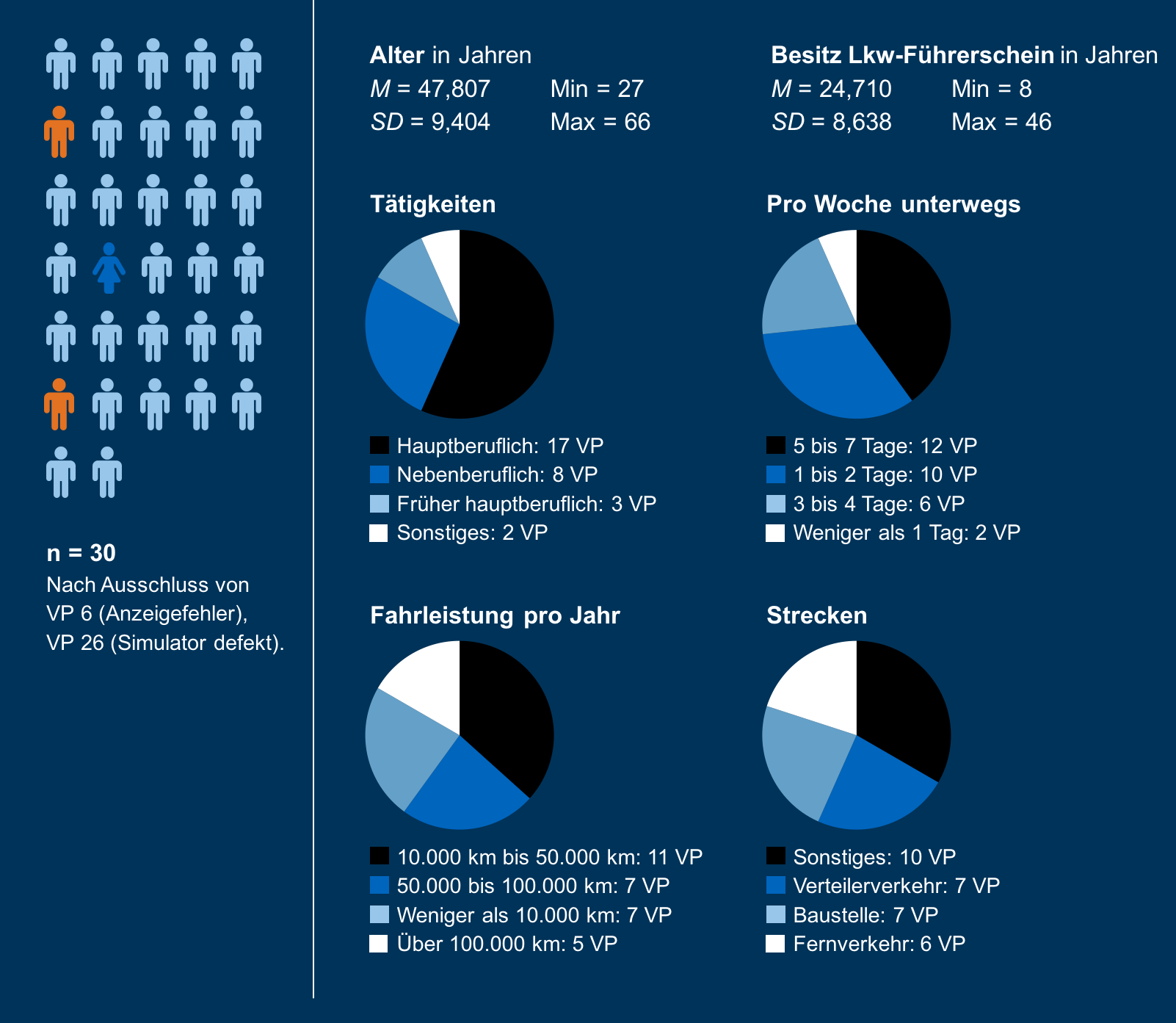
A driving simulator study was conducted with 30 professional truck drivers to assess the HMI in a controlled environment. The study involved:
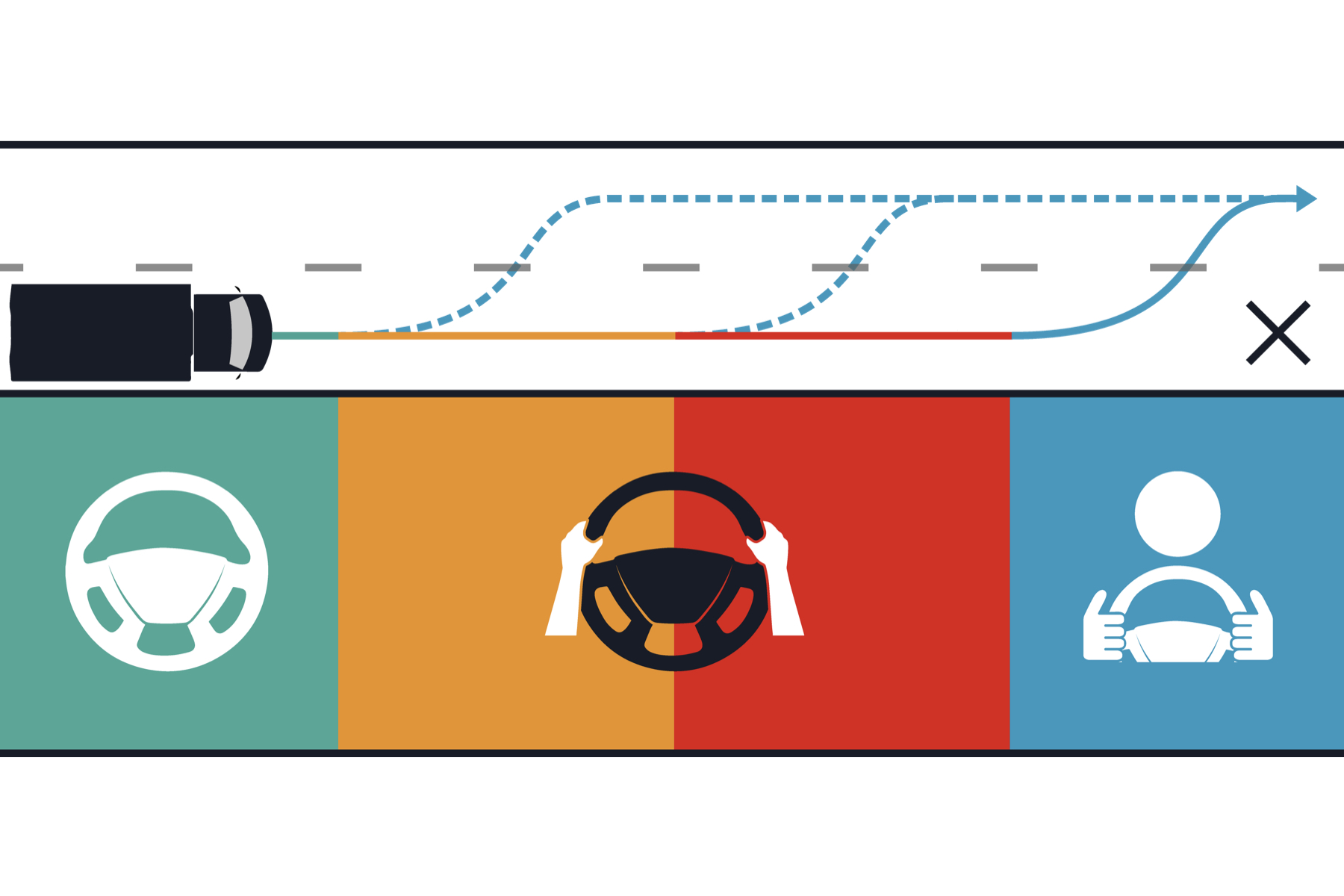
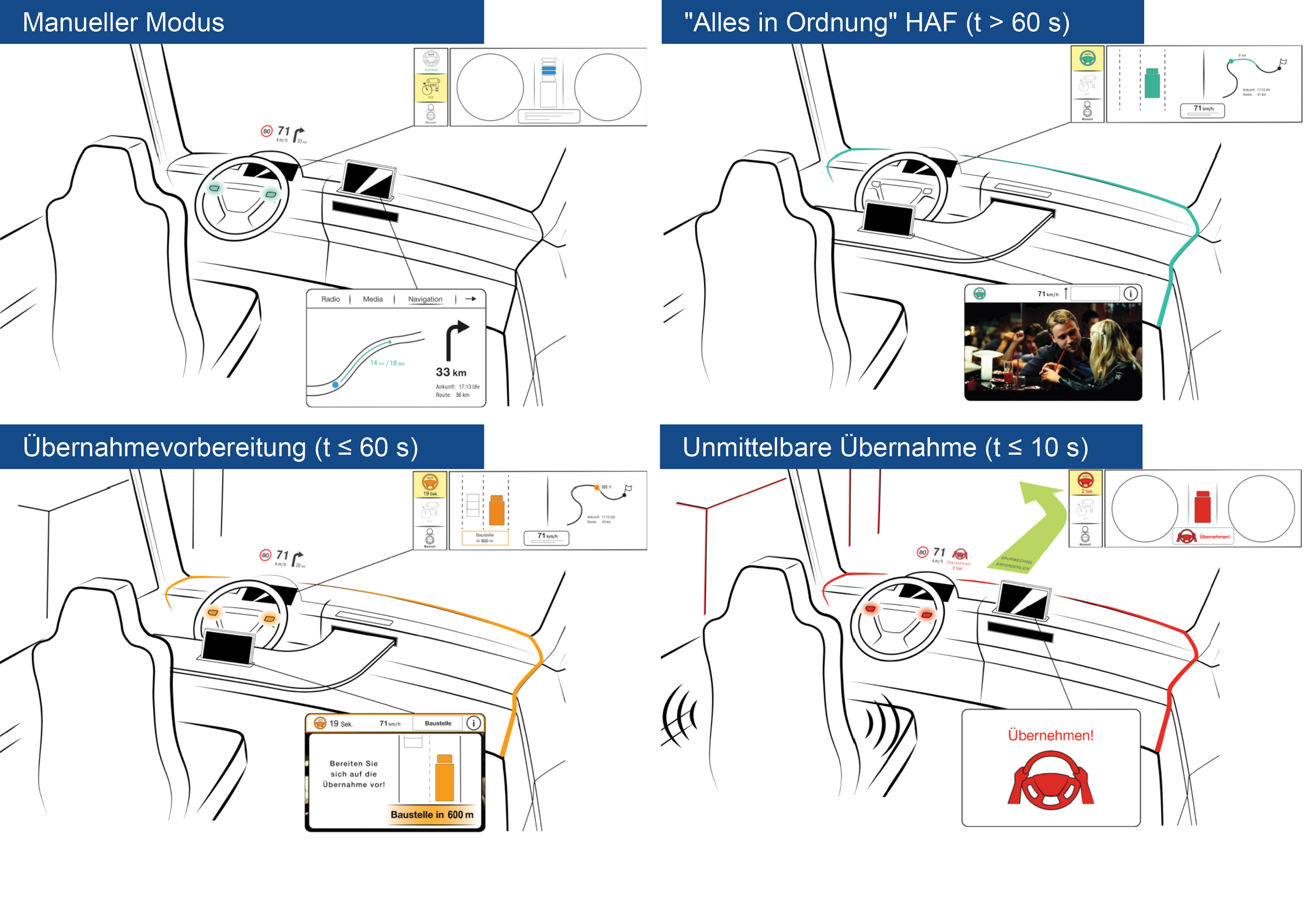
- Truck-specific highway scenarios: Six scenarios were designed based on existing research (Richardson et al., 2017). Four scenarios required the driver to take over control, with two variations in warning times (60s vs. 10s).
- Driver distraction conditions: During automated driving, participants engaged in reading a magazine article, ensuring they were fully distracted when takeover requests occurred.
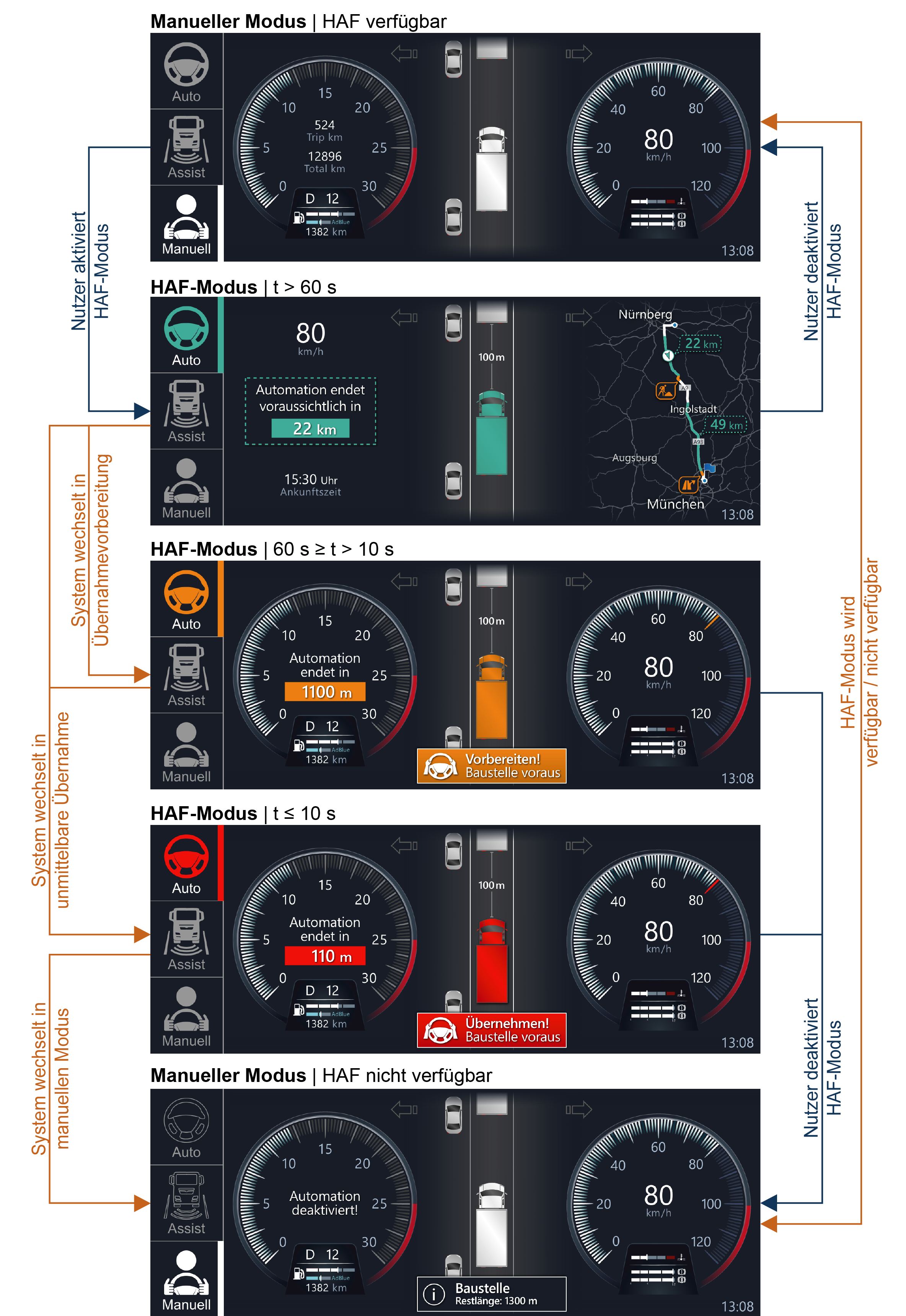
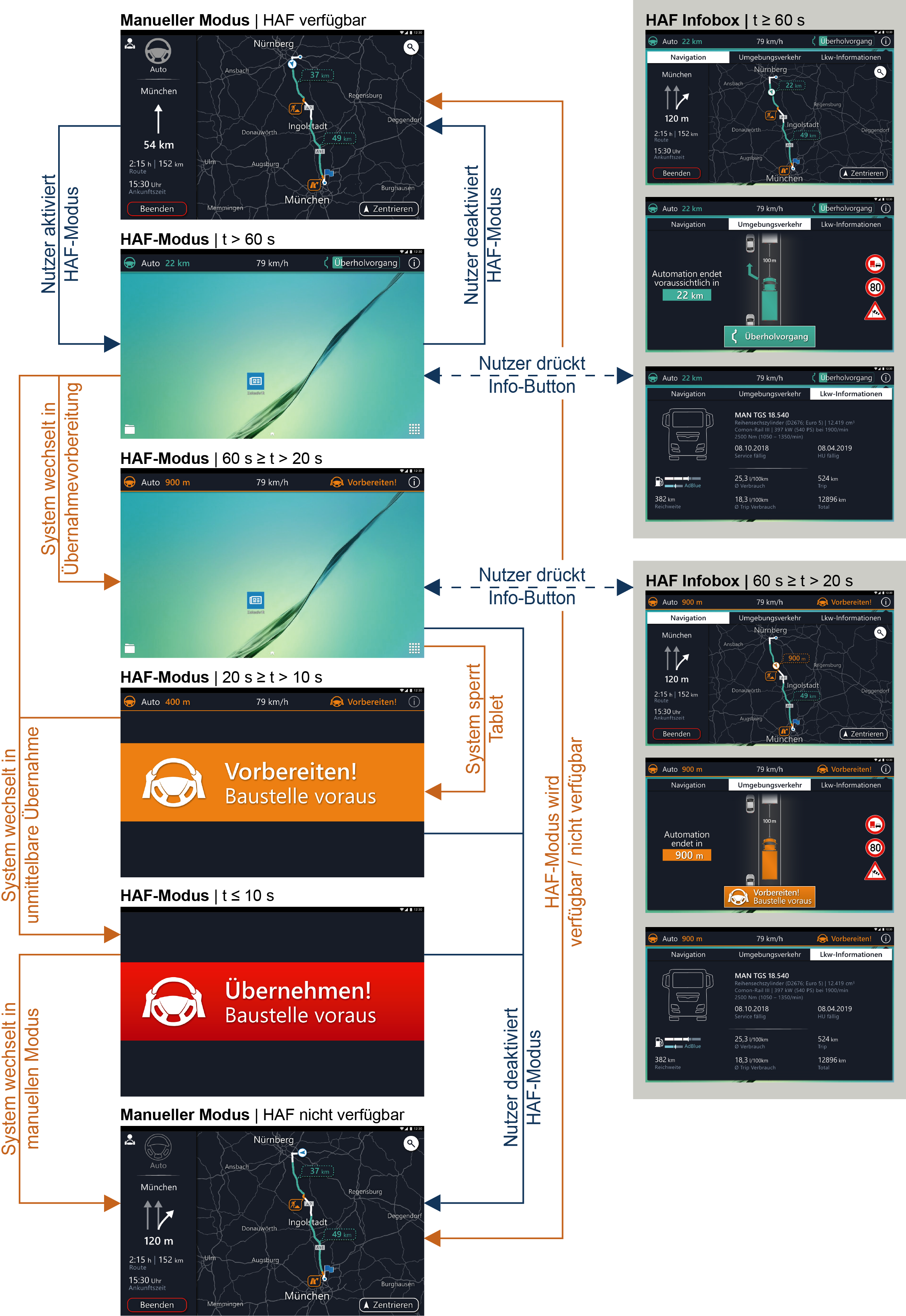
- Three HMI information variants: The system displayed either time-based, distance-based, or no information about remaining automation availability.
- Evaluation metrics: Participants rated the system on factors such as controllability, workload, acceptance, user experience, information clarity, and overall comfort.
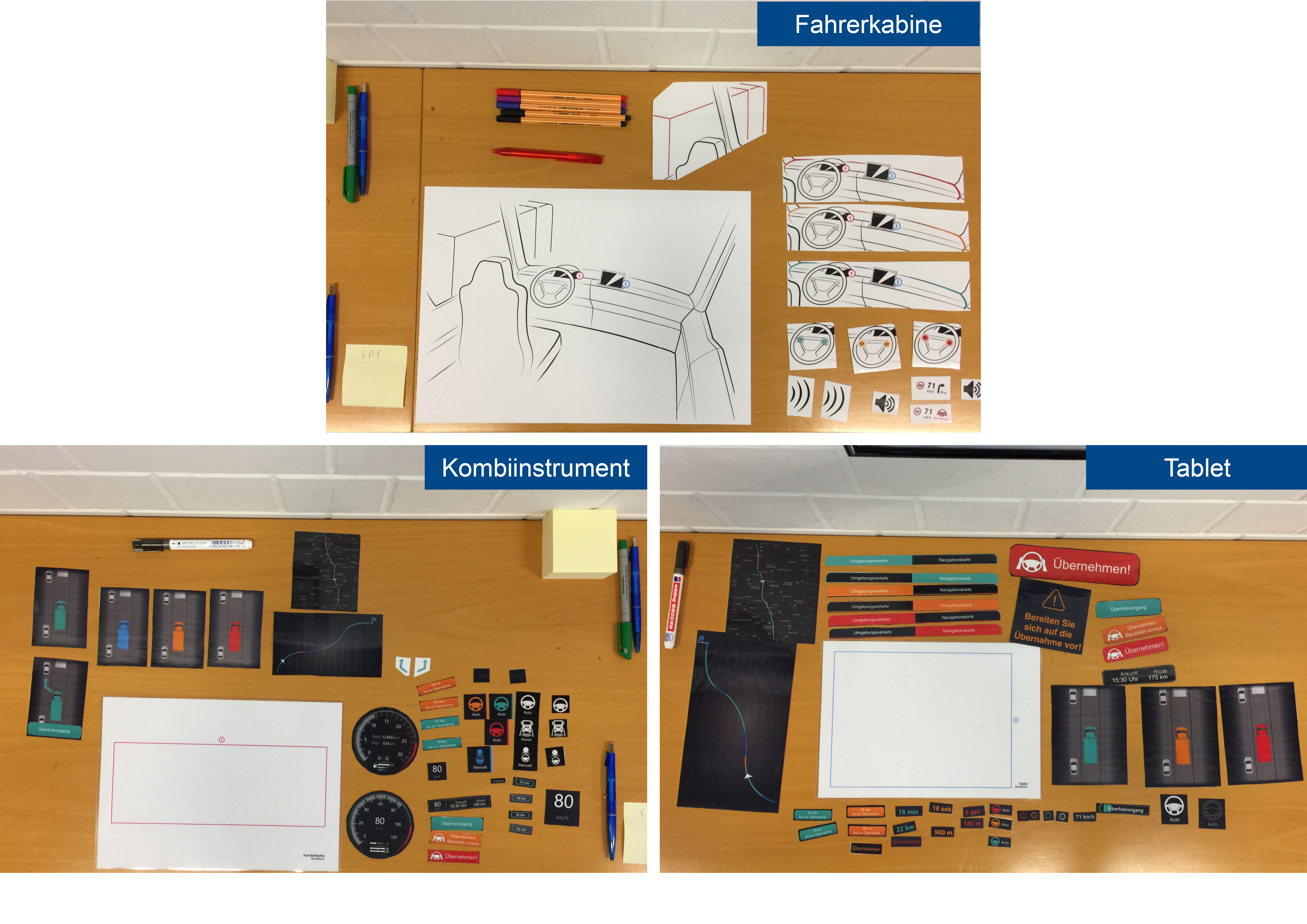
A qualitative final survey and a „mix and match“ workshop allowed participants to suggest their own display concepts, highlighting preferred designs and information delivery methods.
Key Findings
- Variants that provided takeover availability (either time- or distance-based) were rated significantly higher in terms of usability and driver confidence compared to the no-information variant.
- Drivers exhibited lower reaction times and smoother control transitions when provided with advance takeover information, particularly in the 60-second warning condition.
- The no-information variant led to increased cognitive workload and stress, as drivers had difficulty assessing when they needed to regain control.
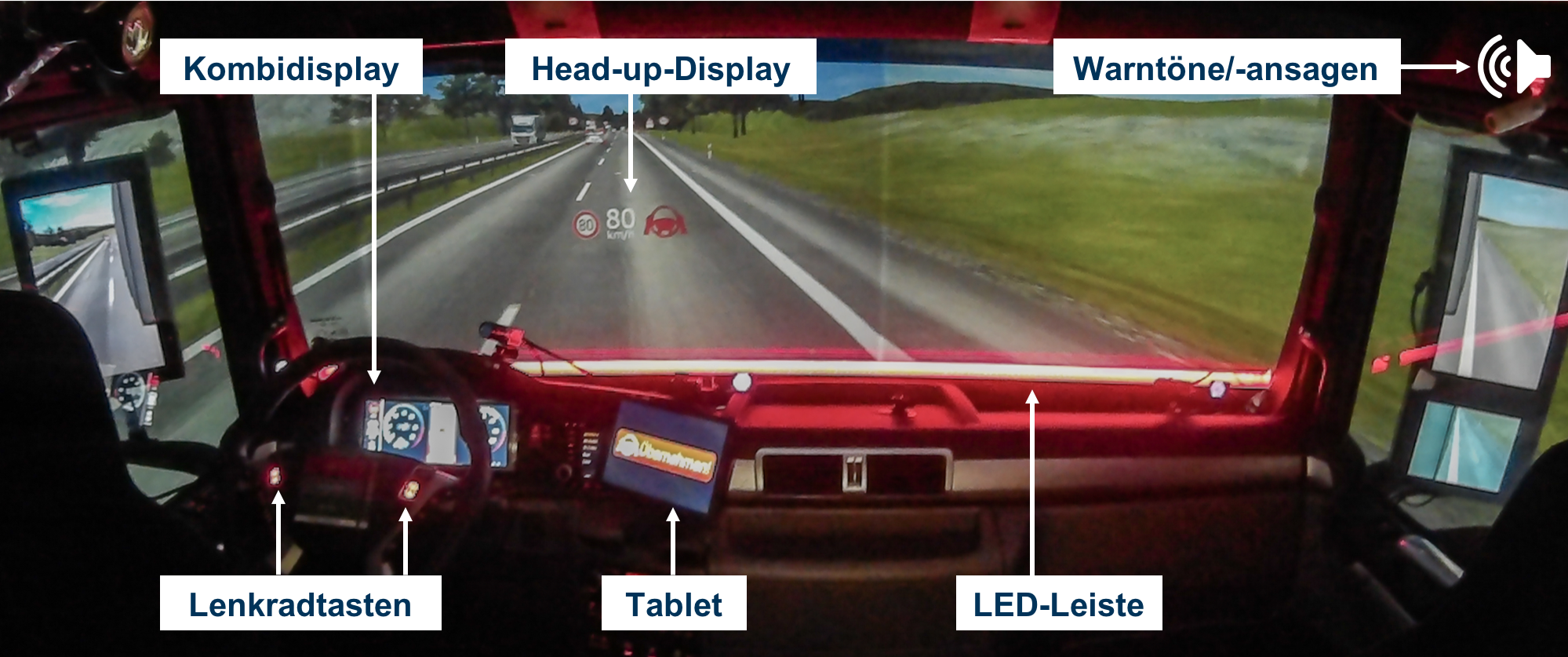
- Participants expressed a preference for a combination of visual and auditory cues, with many suggesting that haptic feedback could further improve response times.
- Post-experiment interviews revealed that drivers found distance-based availability information slightly more intuitive than time-based information, as it directly correlated with their driving environment.
Assessment of Conformity with ISO 15005
The HMI was also evaluated for compliance with ISO 15005, which defines standards for in-vehicle dialogue management. While most requirements were met, deficiencies were identified in:
- Alignment with driver expectations
- Compatibility with vehicle guidance
- Timing and prioritization of displayed information
- Consistency across system components
Optimization & Future Development
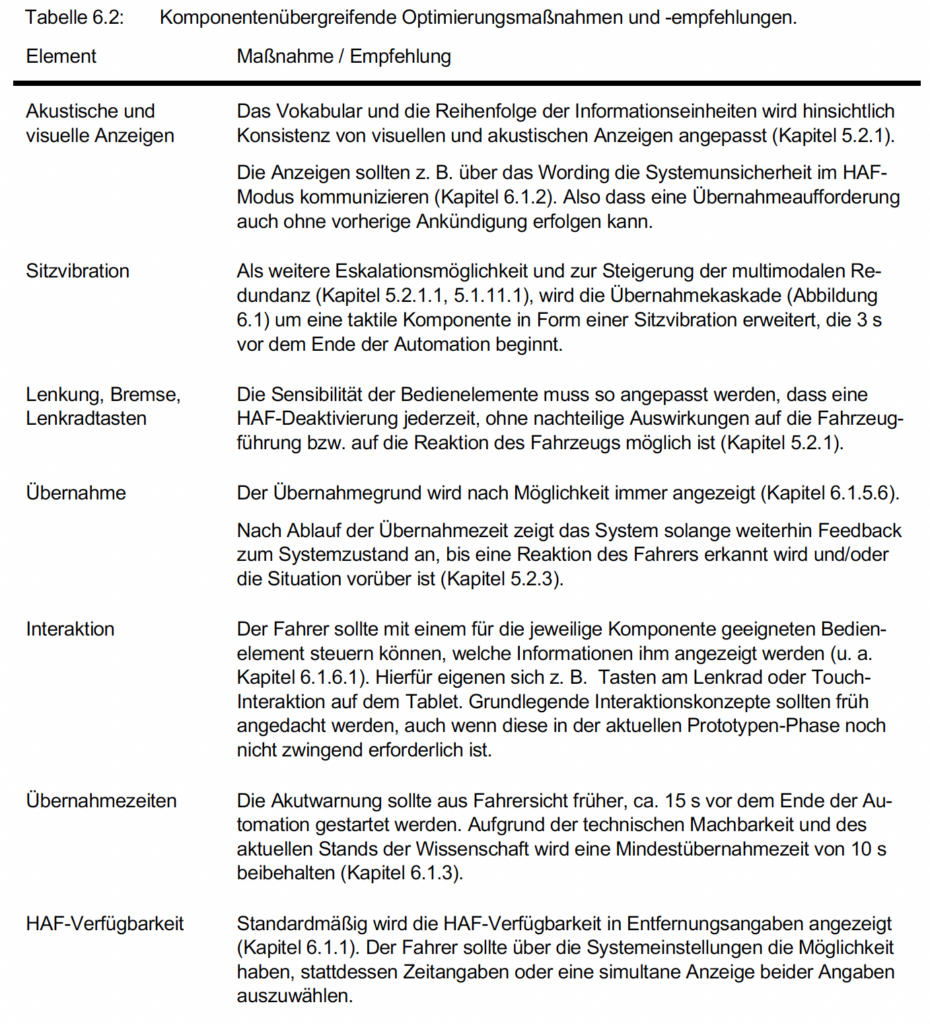
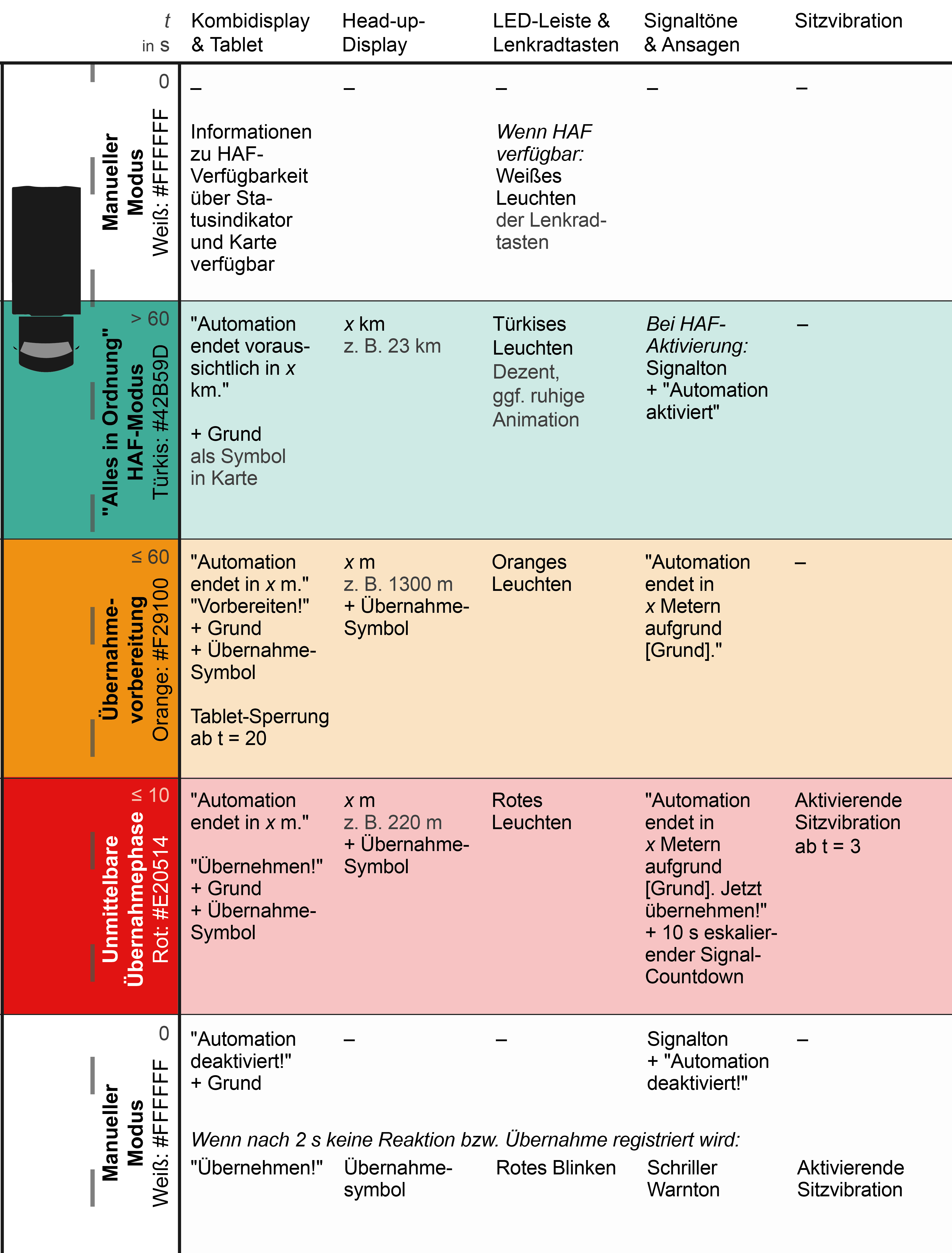
Findings from both the simulator study and ISO 15005 assessment led to several optimization measures and specific redesign proposals (see screenshots below as well as Thesis Chapter 6.2 and Appendix D):
- Consistent UI design across all modalities to improve clarity and ease of use.
- Enhanced map display details to provide more comprehensive situational awareness.
- Integration of haptic feedback into the warning cascade for multimodal alerting.
- Post-takeover information displays to assist drivers in regaining full control after automation disengages.
This project lays the groundwork for further iterative development following a human-centered design approach. Future work should focus on:
- Evaluating driver reactions in critical real-world scenarios requiring immediate takeovers.
- Studying long-term adaptation and trust-building in highly automated truck driving.
- Refining HMI features based on continued user feedback and usability studies.
By addressing these challenges, this research contributes to the development of safer and more effective HMI solutions for highly automated trucks, ultimately enhancing both driver experience and road safety.

References
K. Bengler, K. Dietmayer, B. Färber, M. Maurer, und H. Winner, „Three Decades of Driver Assistance Systems – Review and Future Perspectives“, IEEE Intell. Transp. Syst. Mag., Bd. 6, Nr. 4, S. 6–22, 2014.
M. Czaplarski, „Umsetzung und Evaluation einer Mensch-Maschine-Schnittstelle für das hochautomatisierte Fahren im Lkw“, Masterarbeit, Technische Unviersität München, 2018.
Daimler AG, „Autonom durch Nevada. Freightliner Inspiration Truck“, 2018. [Online]. Verfügbar unter: https://www.daimler.com/innovation/autonomes-fahren/freightlinerinspiration-truck.html. [Zugegriffen: 11-Sep-2018].
H. Flämig, „Autonome Fahrzeuge und autonomes Fahren im Bereich des Gütertransportes“, in Autonomes Fahren, M. Mauerer, J. C. Gerdes, B. Lenz, und H. Winner, Hrsg. Wiesbaden: Springer Vieweg, 2015, S. 377 – 398.
Fraunhofer IAO, „Hochautomatisiertes Fahren auf Autobahnen – Industriepolitische Schlussfolgerungen“, 2015.
T. M. Gasser, C. Arzt, M. Ayoubi, A. Bartels, L. Bürkle, J. Eier, F. Flemisch, D. Häcker, T. Hesse, W. Huber, C. Lotz, M. Maurer, S. Ruth-Schumacher, J. Schwarz, und W. Vogt, „Rechtsfolgen zunehmender Fahrzeugautomatisierung“, Bergisch Gladbach, 2012.
K. Kaur und G. Rampersad, „Trust in driverless cars: Investigating key factors influencing the adoption of driverless cars“, J. Eng. Technol. Manag., Bd. 48, S. 87–96, 2018.
C. Lehmer, „Konzeption und Evaluation einer Mensch-Maschine-Schnittstelle für das hochautomatisierte Fahren im Lkw“, Masterarbeit, Technischen Universität München, 2018.
D. Manzey, „Systemgestaltung und Automatisierung“, in Human Factors, 2. Aufl., P. Badke-Schaub, G. Hofinger, und K. Lauche, Hrsg. Berlin Heidelberg: Springer, 2012, S. 333–352.
N. Richardson, B. Michel, A. Zimmermann, und F. Diermeyer, „Erfassung und Bewertung des Informationsbedarfs von Lkw-Fahrern während hochautomatisierter Fahrt“, in 9. VDI-Tagung – Der Fahrer im 21. Jahrhundert, 2017, S. 1–13.
N. T. Richardson, C. Lehmer, B. Michel, und M. Lienkamp, „Conceptual design and evaluation of a human machine interface for highly automated truck driving“, Intell. Veh. Symp., S. 2072–2077, 2018.
Metadata
Master’s Thesis
Advisors & Reviewers
Institutions
Related Publications
Natalie T. Richardson, Lukas Flohr, and Britta Michel. 2018. Takeover Requests in Highly Automated Truck Driving: How Do the Amount and Type of Additional Information Influence the Driver–Automation Interaction? Multimodal Technologies and Interaction 2, 4 (2018), 68. https://doi.org/10.3390/mti2040068
Natalie Tara Richardson. 2020. Konzeption und Langzeittest der Mensch-Maschine-Schnittstelle für das hochautomatisierte Fahren im Lkw. Dissertation. Technical University of Munich, Munich, Germany. https://mediatum.ub.tum.de /1520460